12 July 2013, 11:28 UTC
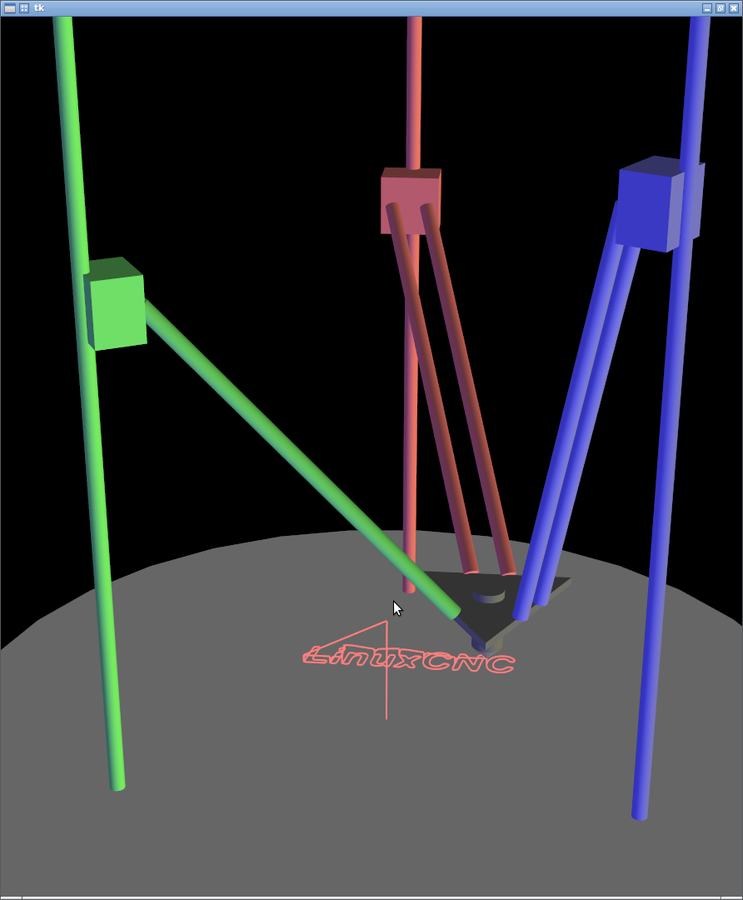
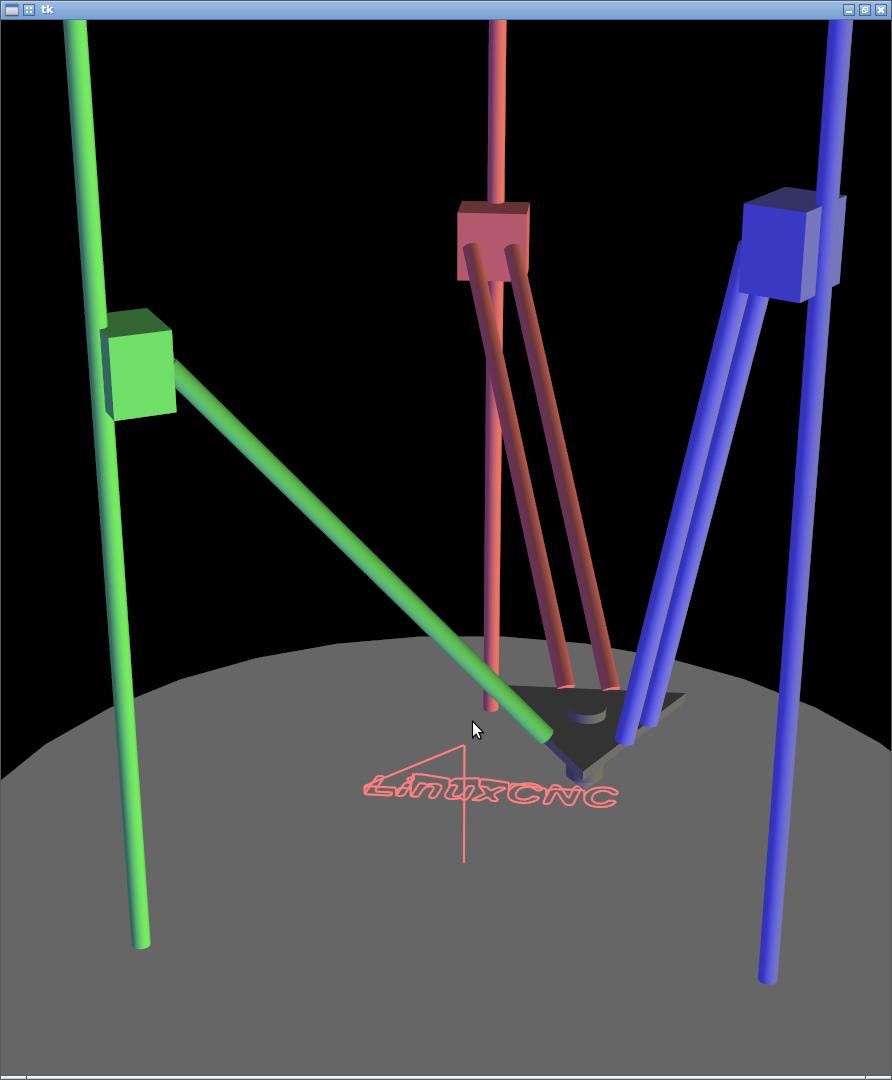
I'm still awaiting delivery of my Rostock MAX, and converting it to use LinuxCNC is even further in the future, but I've been working on a LinuxCNC kinematics model and visualization.
Linear Delta Kinematics
I'm still awaiting delivery of my Rostock MAX, and converting it to use LinuxCNC is even further in the future, but I've been working on a LinuxCNC kinematics model and visualization.
{kind=link}
All older entries
Website Copyright © 2004-2024 Jeff Epler